Objective
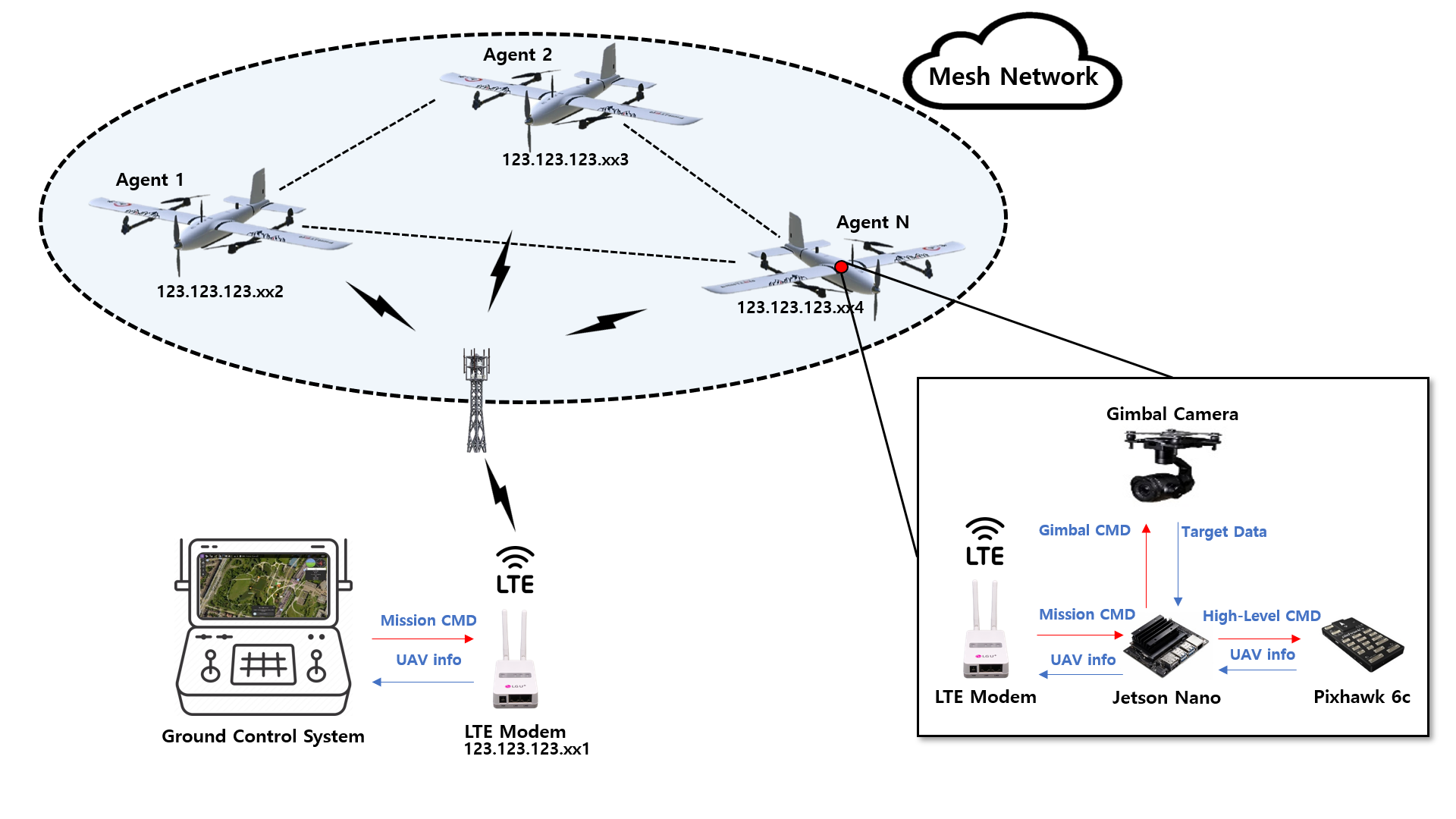
To develop simulation platform for verification of Multi Agent Operation as shown in following Fig, such as flight algorithm, communicaition stability inter agents, monitoring flight status and so on.
Multi HILS Architecture
In Multi HILS, all hardware components are distributed to ensure modularity and reusability. Each agent consists of hardware components such as autopilot, mission computer and LTE modem. In the context, the autopiolot of each agent are connected in parallel to simulator computer, where dynamic simulator gazebo is set up to simulate 6-DOF, via USB. Because the gazebo anlaysis each autopilot command through specific ID number, it may enble simulate the multipe agents.
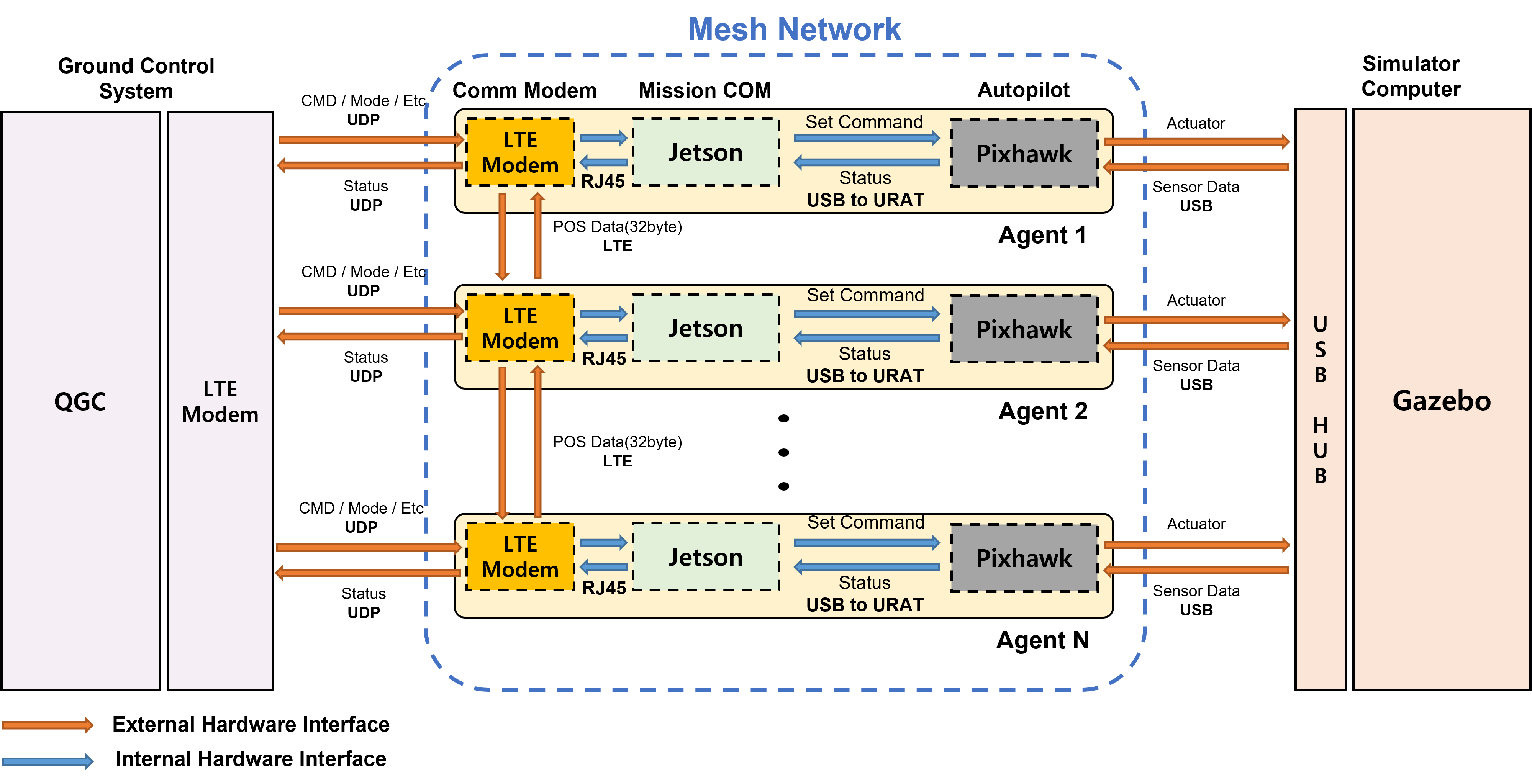
Hardware componets of Multi HILS
- Autopilot : Pixhawk 6c
- Mission Computer : Jetson Nano
- Comm Modem : LTE Router
- Simulator : Gazebo
- GCS : QGroundControl
Software Configuration
The following multiple processes are developed to test a variety of operation conditions like flight algorithm, communication stablilty and flight monitoring.
- To setup network inter vehicles, the V2V Package is implemented. V2V Package enable each vehicles to communicate each other via UDP.
- To monitor real-time flight operation for checking the flight status, UDP-based video transmission process, Flight Monitor Package is developed.
- To communicate inter inter mission computer and the autopilot, and to send high-level control commands from the mission computer, High-Level Package is developed.
Simulation Test-Bed
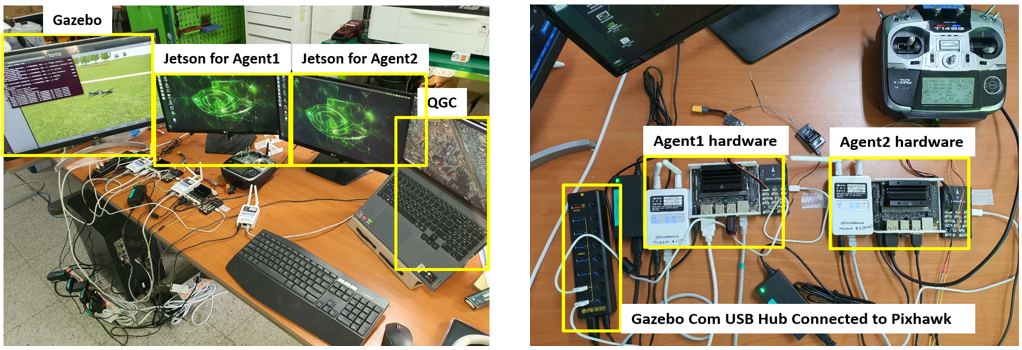
On the left is the overall Multi HILS test bed, and on the right, the hardware components of each agent are shown. In Multi HILS, a variety of scenarios like collision avoidance, path-following and system stability while agents on simulator operate missions may be simulated.
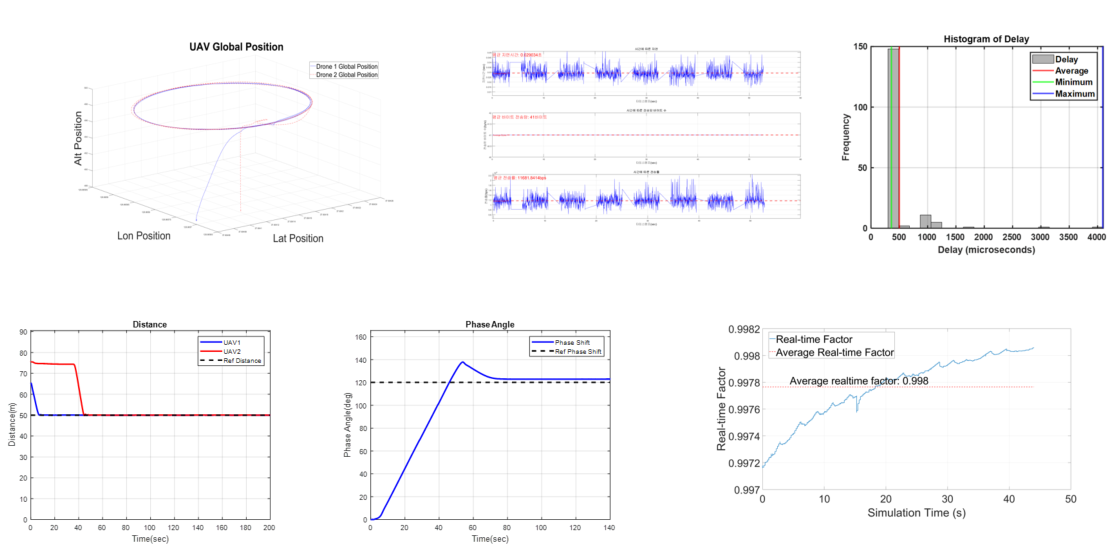
Simulation Result
In Multi HILS, this study configured a variety of data, including the mission algorithms of multiple agents, the communication status, video transmission delay, and real-time aspects of the simulation and so on.