● Background
• Performing surveillance and exploration missions in the military and police fields using unmanned aerial vehicles
• In surveillance and exploration missions, targets may be uncooperative.
• The UAVs must estimate the location and status of the target on their own.
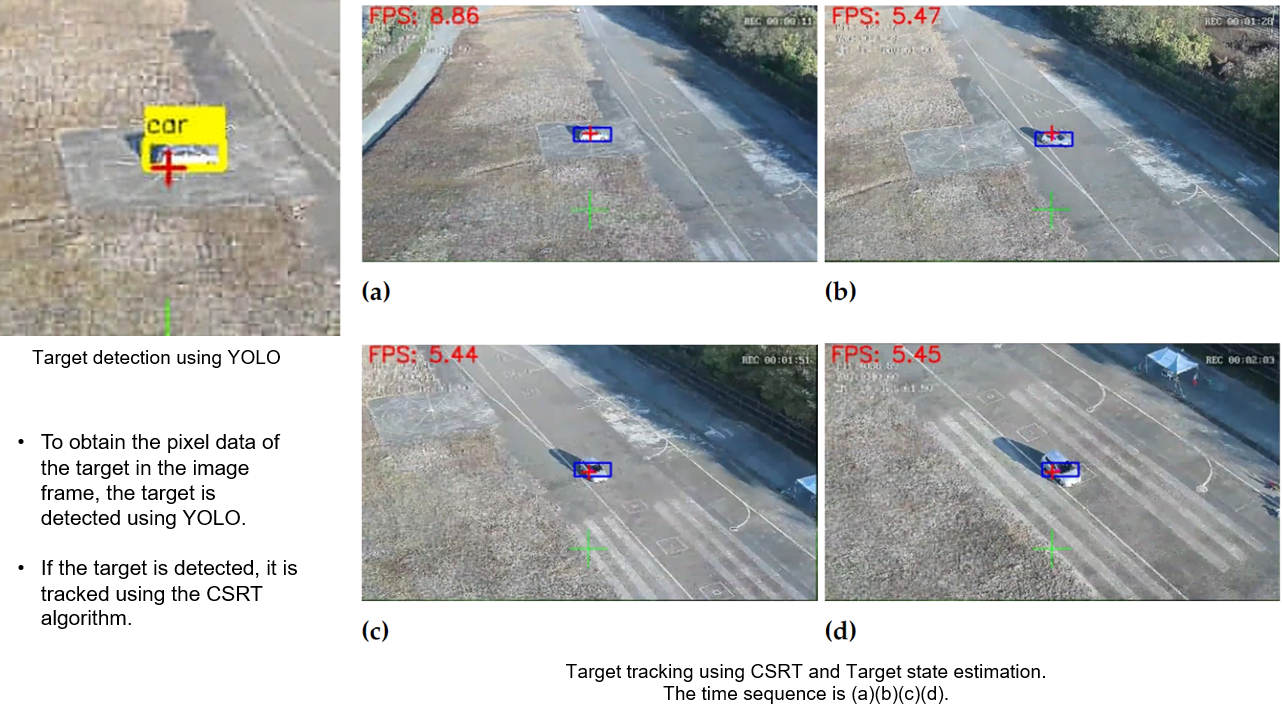
• Estimating the location of the target using a gimbal camera.
• Performance verification through simulation and flight tests.
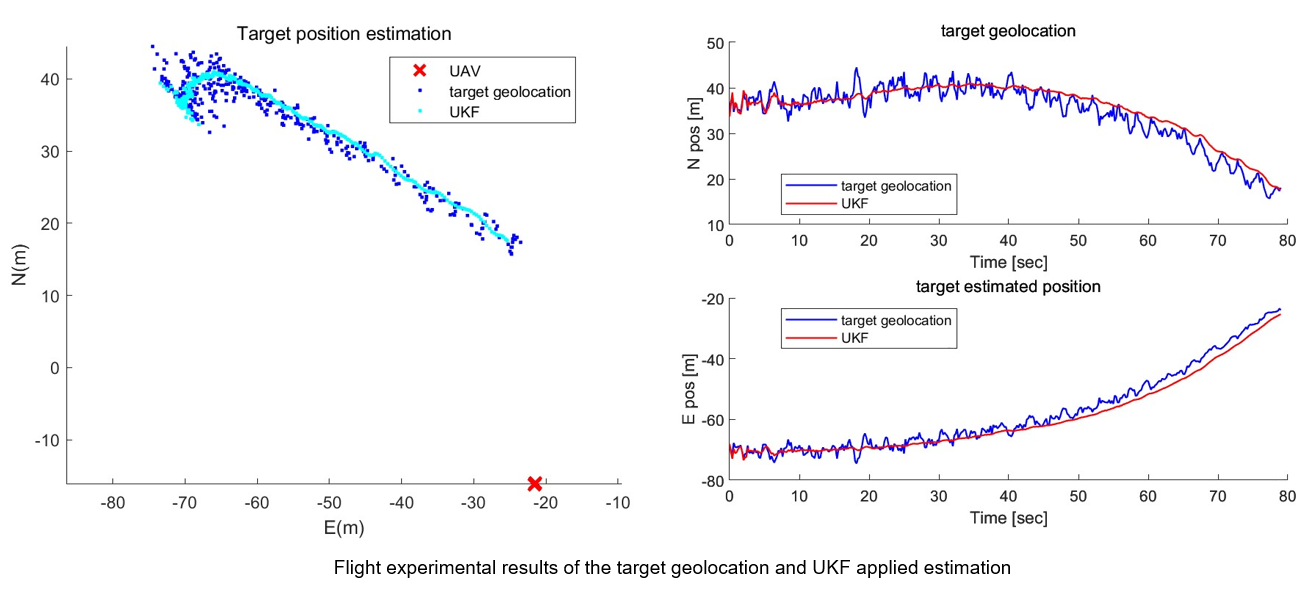
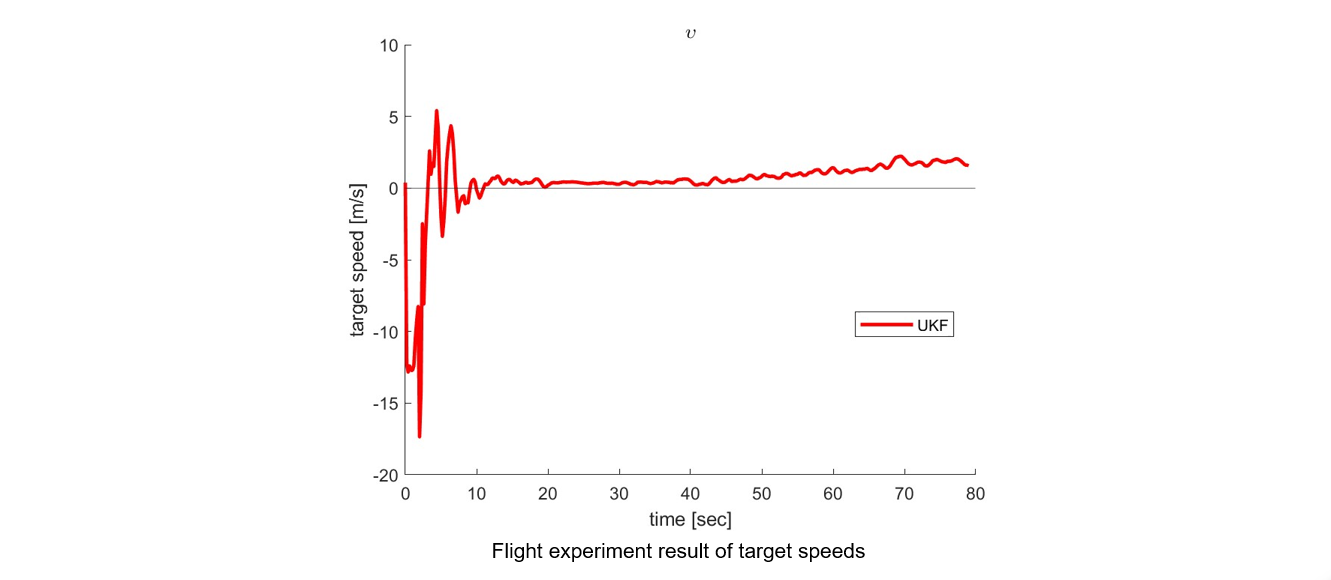
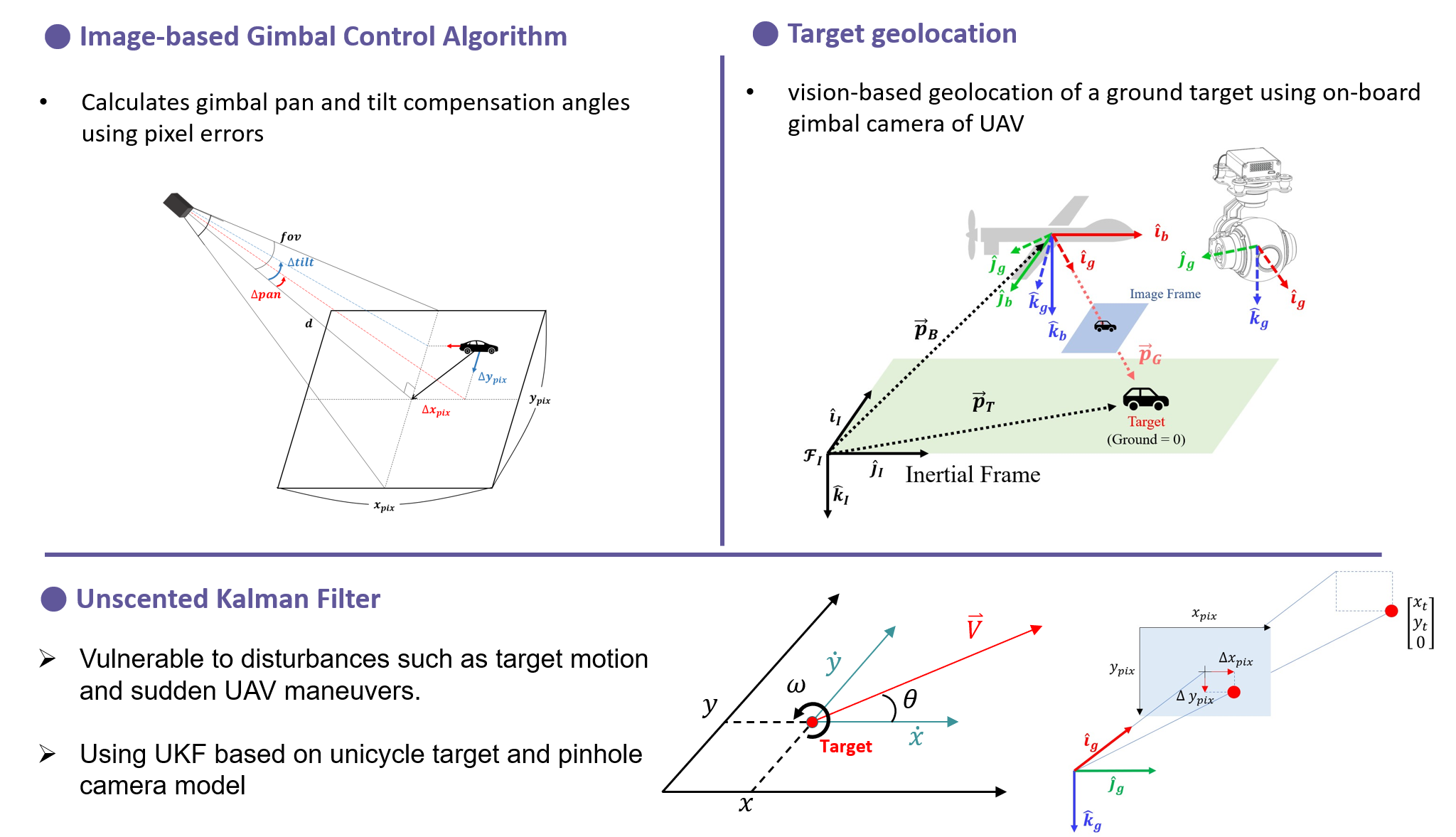
● Target Estimation Algorithm using Kalman Filter
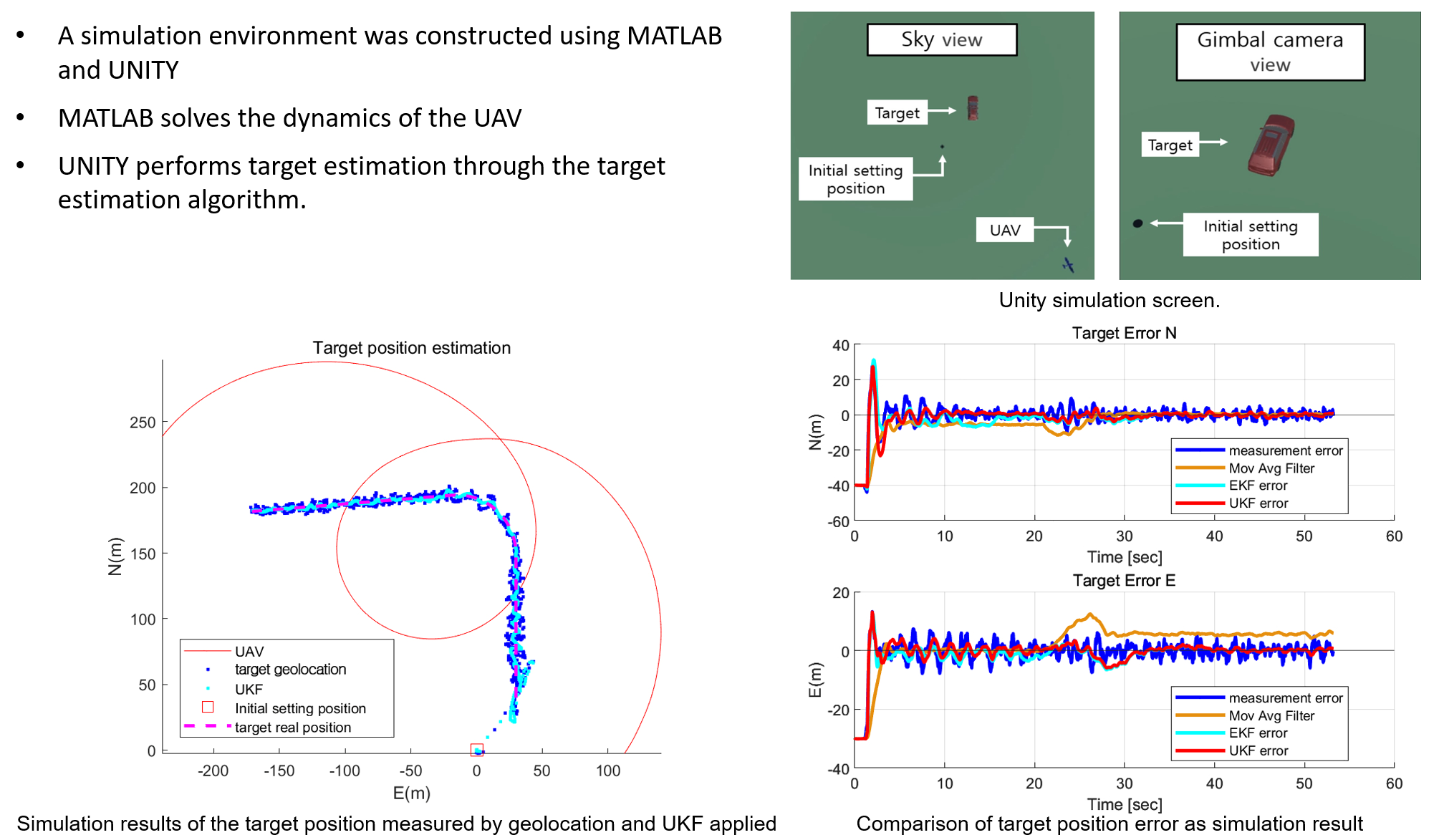
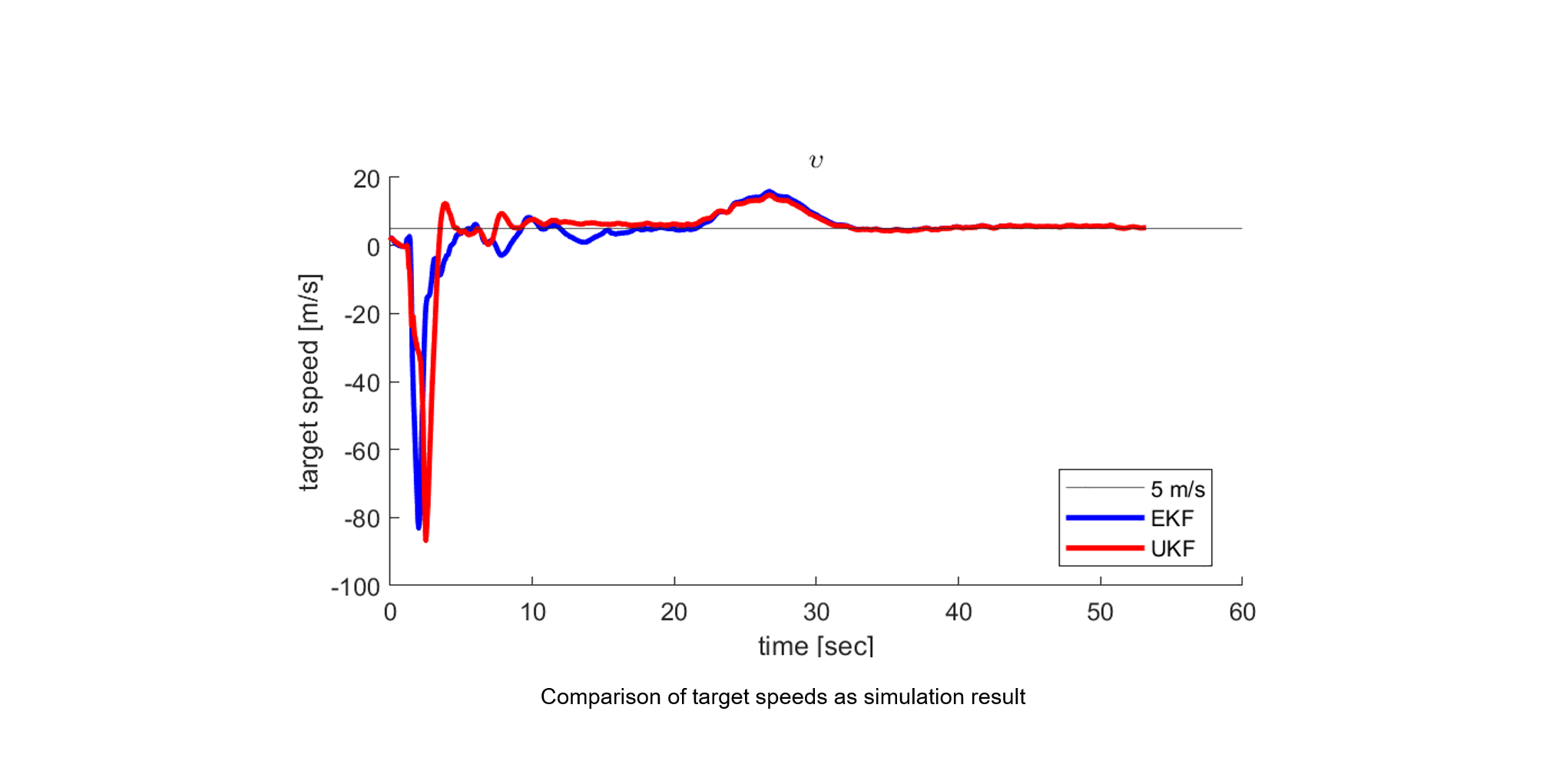
● Simulation
● VTOL UAV platform

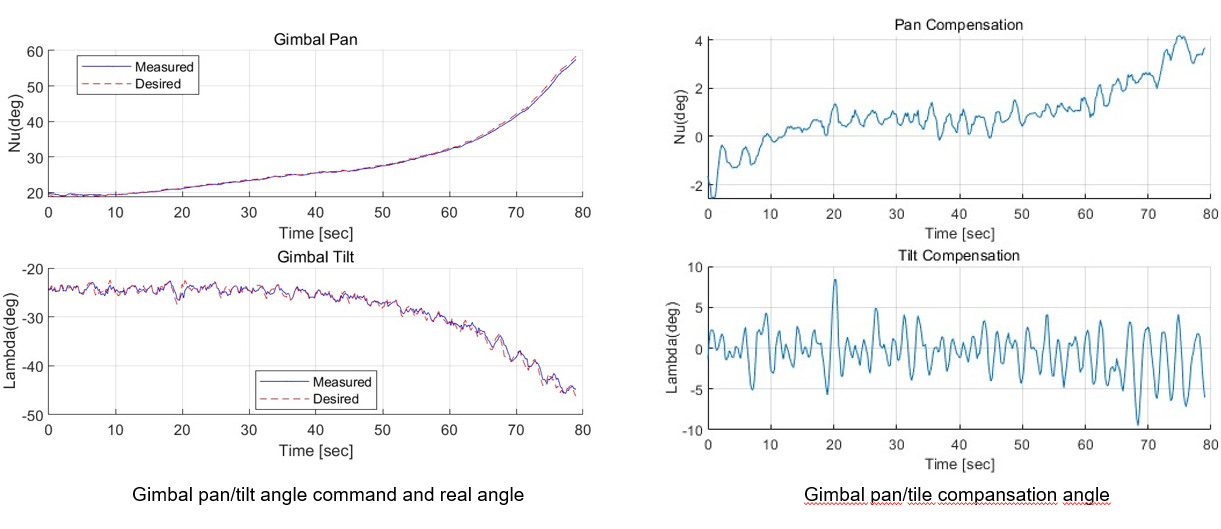
● Flight test