
Objective
Design a robust nonlinear path following control law for a fixed-wing UAV to track a reference path under the wind disturbance
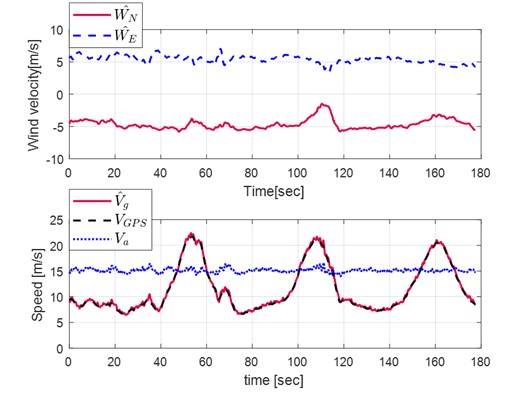
Disturbance Observer
System model for the wind estimator
$$ \begin{bmatrix} \dot{x} \\ \dot{y} \end{bmatrix} = \begin{bmatrix} V_a \cos \psi + W_N \\ V_a \sin \psi + W_E \end{bmatrix}$$
Update law of the disturbance observer
$$ \dot{\hat{\bf{w}}} = -T_w \hat{\bf{w}} + T_w ( \dot{\bf{x}} – \bf{u}) $$
where, \( \hat{\bf{w}} = \begin{bmatrix} \hat W_n & \hat W_e \end{bmatrix}^T \) is the wind velocity estimate in the north and east direction, \( T_w \) is the diagonal observer gain matrix, and \( \bf{u} = \begin{bmatrix} V_a \cos \psi & V_a \sin \psi \end{bmatrix}^T \)
System Model
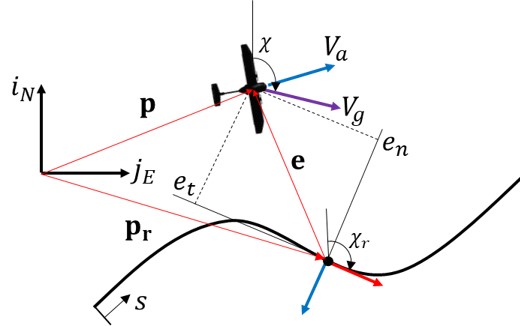
The error kinematics model becomes,
$$ \begin{align} \dot{e}_t &= V_g \cos (\chi – \chi_r ) – ( 1 – \kappa (s) e_n ) \dot{s} \\ \dot{e}_n &= V_g \sin (\chi – \chi_r ) – \kappa (s) e_t \dot{s} \end{align} $$
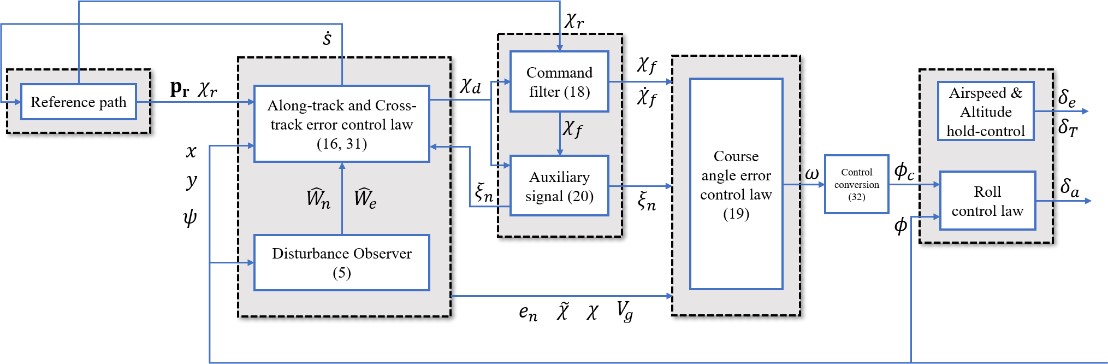
Path Following Control Law
Command Filtered Backstepping
Hardware-in-the-loop Tests
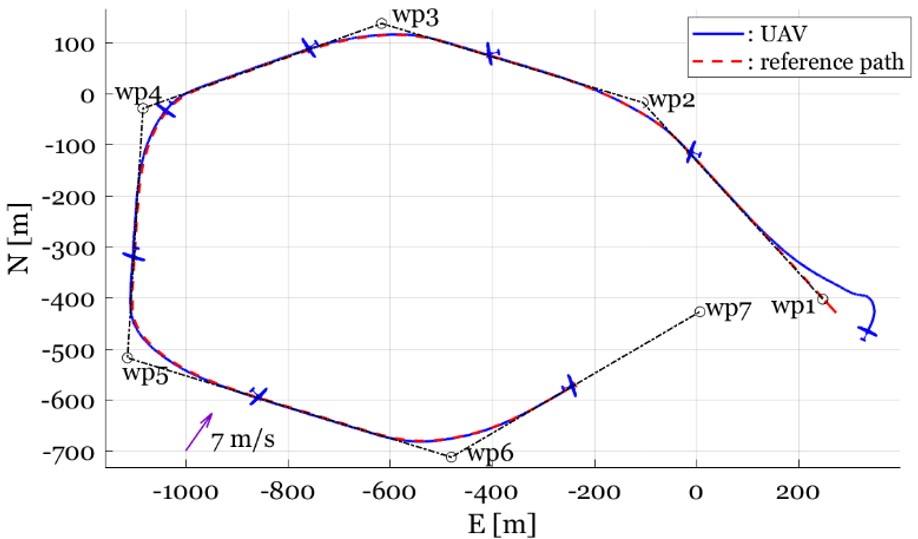
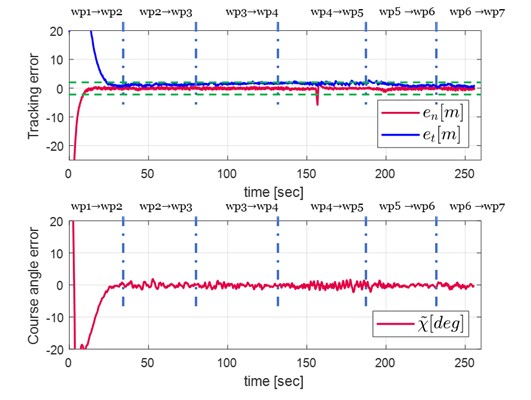
Bspline Path Following
Flight Tests
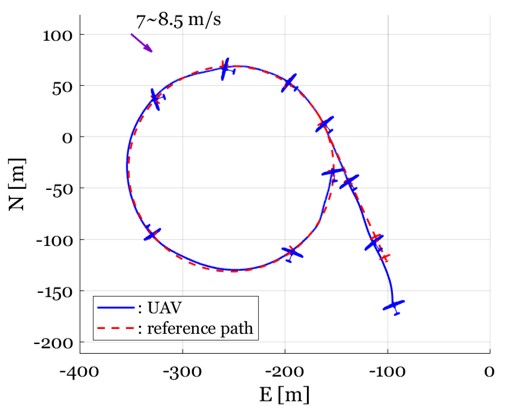
Circular trajectory following
Conclusion
The experimental results show that the improved tracking performance as well as the enhanced robustness, proving the applicability of the proposed algorithm in the various mission of the fixed-wing UAV in wind disturbance environment.
Researcher
김수현(Kim Su Hyeon)
angelfive92@gmail.com